ຈົ່ງຈື່ຈໍາຫຼັກການຂອງມໍເຕີແລະສູດທີ່ສໍາຄັນຈໍານວນຫນຶ່ງ, ແລະຄິດອອກ motor ງ່າຍຫຼາຍ!
ມໍເຕີ, ໂດຍທົ່ວໄປເອີ້ນວ່າມໍເຕີໄຟຟ້າ, ເຊິ່ງເອີ້ນກັນວ່າມໍເຕີ, ແມ່ນທົ່ວໄປທີ່ສຸດໃນອຸດສາຫະກໍາທີ່ທັນສະໄຫມແລະຊີວິດ, ແລະຍັງເປັນອຸປະກອນທີ່ສໍາຄັນທີ່ສຸດສໍາລັບການປ່ຽນພະລັງງານໄຟຟ້າເປັນພະລັງງານກົນຈັກ.ມໍເຕີໄດ້ຖືກຕິດຕັ້ງຢູ່ໃນລົດ, ລົດໄຟຄວາມໄວສູງ, ເຮືອບິນ, ກັງຫັນລົມ, ຫຸ່ນຍົນ, ປະຕູອັດຕະໂນມັດ, ປັ໊ມນ້ໍາ, ຮາດດິດແລະແມ້ກະທັ້ງໂທລະສັບມືຖືທົ່ວໄປທີ່ສຸດຂອງພວກເຮົາ. ຫຼາຍຄົນທີ່ຍັງໃໝ່ກັບມໍເຕີ ຫຼືຜູ້ທີ່ຫາກໍ່ຮຽນຄວາມຮູ້ດ້ານການຂັບຂີ່ລົດຈັກ ອາດຈະຮູ້ສຶກວ່າຄວາມຮູ້ກ່ຽວກັບມໍເຕີເປັນເລື່ອງຍາກທີ່ຈະເຂົ້າໃຈ, ແລະກໍ່ເຫັນຫຼັກສູດທີ່ກ່ຽວຂ້ອງ, ແລະພວກເຂົາເອີ້ນວ່າ "ນັກຂ້າສິນເຊື່ອ".ການແບ່ງປັນທີ່ກະແຈກກະຈາຍຕໍ່ໄປນີ້ສາມາດເຮັດໃຫ້ຈົວເຂົ້າໃຈໄດ້ໄວກ່ຽວກັບຫຼັກການຂອງມໍເຕີ AC asynchronous. ຫຼັກການຂອງມໍເຕີ: ຫຼັກການຂອງມໍເຕີແມ່ນງ່າຍດາຍຫຼາຍ.ເວົ້າງ່າຍໆ, ມັນແມ່ນອຸປະກອນທີ່ໃຊ້ພະລັງງານໄຟຟ້າເພື່ອສ້າງສະຫນາມແມ່ເຫຼັກ rotating ໃນ coil ແລະ pushes rotor rotate.ໃຜກໍ່ຕາມທີ່ໄດ້ສຶກສາກົດຫມາຍຂອງການ induction ແມ່ເຫຼັກໄຟຟ້າຮູ້ວ່າ coil energized ຈະຖືກບັງຄັບໃຫ້ rotate ໃນພາກສະຫນາມແມ່ເຫຼັກ.ນີ້ແມ່ນຫຼັກການພື້ນຖານຂອງມໍເຕີ.ນີ້ແມ່ນຄວາມຮູ້ດ້ານຟີຊິກໂຮງຮຽນມັດທະຍົມ. ໂຄງສ້າງມໍເຕີ: ໃຜກໍ່ຕາມທີ່ຖອດມໍເຕີຮູ້ວ່າມໍເຕີສ່ວນໃຫຍ່ແມ່ນປະກອບດ້ວຍສອງສ່ວນ, ສ່ວນ stator ຄົງທີ່ແລະສ່ວນ rotor rotating, ດັ່ງຕໍ່ໄປນີ້: ຫຼັກ stator: ເປັນສ່ວນຫນຶ່ງທີ່ສໍາຄັນຂອງວົງຈອນແມ່ເຫຼັກຂອງມໍເຕີ, ທີ່ stator windings ໄດ້ຖືກວາງໄວ້; stator winding: ມັນແມ່ນ coil, ພາກສ່ວນວົງຈອນຂອງມໍເຕີ, ທີ່ເຊື່ອມຕໍ່ກັບການສະຫນອງພະລັງງານແລະນໍາໃຊ້ເພື່ອສ້າງສະຫນາມແມ່ເຫຼັກ rotating; ພື້ນຖານເຄື່ອງຈັກ: ແກ້ໄຂຫຼັກ stator ແລະຝາປິດທ້າຍມໍເຕີ, ແລະມີບົດບາດໃນການປົກປ້ອງແລະການລະບາຍຄວາມຮ້ອນ; ແກນ rotor: ເປັນສ່ວນຫນຶ່ງທີ່ສໍາຄັນຂອງວົງຈອນແມ່ເຫຼັກຂອງມໍເຕີ, winding rotor ໄດ້ຖືກຈັດໃສ່ໃນຊ່ອງສຽບຫຼັກ; Rotor winding: ຕັດສະຫນາມແມ່ເຫຼັກ rotating ຂອງ stator ເພື່ອສ້າງແຮງໄຟຟ້າ induced ແລະປະຈຸບັນ, ແລະປະກອບເປັນ torque ໄຟຟ້າເພື່ອ rotate motor ໄດ້; 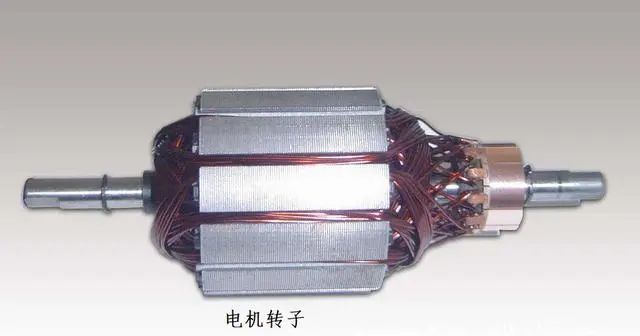
ສູດການຄິດໄລ່ຈໍານວນຫນຶ່ງຂອງມໍເຕີ: 1. ກ່ຽວຂ້ອງກັບແມ່ເຫຼັກໄຟຟ້າ 1) ສູດຜົນບັງຄັບໃຊ້ໄຟຟ້າຂອງມໍເຕີ: E = 4.44 * f * N * Φ, E ແມ່ນຜົນບັງຄັບໃຊ້ໄຟຟ້າຂອງທໍ່, f ແມ່ນຄວາມຖີ່, S ແມ່ນພື້ນທີ່ຕັດຂອງຕົວນໍາອ້ອມຂ້າງ (ເຊັ່ນ: ທາດເຫຼັກ. core), N ແມ່ນຈໍານວນຂອງການຫັນ, ແລະΦແມ່ນແມ່ເຫຼັກຜ່ານ. ວິທີການສູດແມ່ນມາຈາກ, ພວກເຮົາຈະບໍ່ delve ເຂົ້າໄປໃນສິ່ງເຫຼົ່ານີ້, ພວກເຮົາຈະເບິ່ງວິທີການນໍາໃຊ້ມັນສ່ວນໃຫຍ່.ຜົນບັງຄັບໃຊ້ໄຟຟ້າ induced ແມ່ນສໍາຄັນຂອງການ induction ແມ່ເຫຼັກໄຟຟ້າ.ຫຼັງຈາກ conductor ທີ່ມີແຮງໄຟຟ້າ induced ໄດ້ຖືກປິດ, ກະແສ induced ຈະໄດ້ຮັບການຜະລິດ.ກະແສໄຟຟ້າແຮງຈູງໃຈແມ່ນຂຶ້ນກັບກຳລັງແອມເປີ້ໃນສະຫນາມແມ່ເຫຼັກ, ການສ້າງກະແສແມ່ເຫຼັກທີ່ຍູ້ໃຫ້ວົງວຽນຫັນ. ມັນເປັນທີ່ຮູ້ຈັກຈາກສູດຂ້າງເທິງວ່າຂະຫນາດຂອງແຮງໄຟຟ້າແມ່ນອັດຕາສ່ວນກັບຄວາມຖີ່ຂອງການສະຫນອງພະລັງງານ, ຈໍານວນຂອງການຫັນຂອງ coil ແລະ flux ຂອງແມ່ເຫຼັກ. ສູດການຄິດໄລ່ແມ່ເຫຼັກ flux Φ = B * S * COSθ, ໃນເວລາທີ່ຍົນທີ່ມີພື້ນທີ່ S ແມ່ນ perpendicular ກັບທິດທາງຂອງສະຫນາມແມ່ເຫຼັກ, ມຸມ θ ແມ່ນ 0, COSθແມ່ນເທົ່າກັບ 1, ແລະສູດຈະກາຍເປັນ Φ = B * S . 
ການສົມທົບສອງສູດຂ້າງເທິງ, ທ່ານສາມາດໄດ້ຮັບສູດສໍາລັບການຄິດໄລ່ຄວາມເຂັ້ມຂຸ້ນຂອງແມ່ເຫຼັກຂອງມໍເຕີ: B=E/(4.44*f*N*S). 2) ອັນອື່ນແມ່ນສູດຜົນບັງຄັບໃຊ້ Ampere.ເພື່ອຈະຮູ້ວ່າການໄດ້ຮັບຜົນບັງຄັບໃຊ້ໄດ້ຫຼາຍປານໃດ, ພວກເຮົາຕ້ອງການສູດນີ້ F = I * L * B * sinα, ບ່ອນທີ່ຂ້າພະເຈົ້າແມ່ນຄວາມເຂັ້ມແຂງໃນປັດຈຸບັນ, L ແມ່ນຄວາມຍາວຕົວນໍາ, B ແມ່ນຄວາມເຂັ້ມແຂງຂອງສະຫນາມແມ່ເຫຼັກ, αແມ່ນມຸມລະຫວ່າງ. ທິດທາງຂອງປະຈຸບັນແລະທິດທາງຂອງສະຫນາມແມ່ເຫຼັກ.ເມື່ອສາຍຕັ້ງສາກກັບສະຫນາມແມ່ເຫຼັກ, ສູດຈະກາຍ F = I * L * B (ຖ້າມັນເປັນ N-turn coil, flux ແມ່ເຫຼັກ B ແມ່ນ flux ແມ່ເຫຼັກທັງຫມົດຂອງ N-turn coil, ແລະບໍ່ມີ. ຕ້ອງຄູນ N). ຖ້າເຈົ້າຮູ້ແຮງ, ເຈົ້າຈະຮູ້ແຮງບິດ.ແຮງບິດເທົ່າກັບແຮງບິດຄູນດ້ວຍລັດສະໝີຂອງການປະຕິບັດ, T = r * F = r * I * B * L (ຜະລິດຕະພັນ vector).ໂດຍຜ່ານທັງສອງສູດຂອງພະລັງງານ = ຜົນບັງຄັບໃຊ້ * ຄວາມໄວ (P = F * V) ແລະຄວາມໄວເສັ້ນ V = 2πR * ຄວາມໄວຕໍ່ວິນາທີ (n ວິນາທີ), ຄວາມສໍາພັນກັບພະລັງງານສາມາດສ້າງຕັ້ງຂຶ້ນ, ແລະສູດຂອງເລກ 3 ຕໍ່ໄປນີ້ສາມາດ ໄດ້ຮັບ.ຢ່າງໃດກໍ່ຕາມ, ຄວນສັງເກດວ່າແຮງບິດຜົນຜະລິດຕົວຈິງແມ່ນໃຊ້ໃນເວລານີ້, ດັ່ງນັ້ນພະລັງງານທີ່ຄິດໄລ່ແມ່ນພະລັງງານຜົນຜະລິດ. 2. ສູດການຄິດໄລ່ຄວາມໄວຂອງມໍເຕີ asynchronous AC: n = 60f / P, ນີ້ແມ່ນງ່າຍດາຍຫຼາຍ, ຄວາມໄວແມ່ນອັດຕາສ່ວນກັບຄວາມຖີ່ຂອງການສະຫນອງພະລັງງານ, ແລະອັດຕາສ່ວນ inversely ກັບຈໍານວນຂອງຄູ່ pole (ຈື່ຄູ່. ) ຂອງມໍເຕີ, ພຽງແຕ່ນໍາໃຊ້ສູດໂດຍກົງ.ຢ່າງໃດກໍຕາມ, ສູດນີ້ຕົວຈິງແລ້ວການຄິດໄລ່ຄວາມໄວ synchronous (ຄວາມໄວພາກສະຫນາມແມ່ເຫຼັກ rotating), ແລະຄວາມໄວທີ່ແທ້ຈິງຂອງມໍເຕີ asynchronous ຈະຕ່ໍາກວ່າຄວາມໄວ synchronous ເລັກນ້ອຍ, ດັ່ງນັ້ນພວກເຮົາມັກຈະເຫັນວ່າມໍເຕີ 4-pole ໂດຍທົ່ວໄປແມ່ນຫຼາຍກ່ວາ 1400 rpm, ແຕ່ຫນ້ອຍກວ່າ 1500 rpm. 3. ຄວາມສຳພັນລະຫວ່າງແຮງບິດຂອງມໍເຕີ ແລະ ຄວາມໄວເຄື່ອງວັດແທກພະລັງງານ: T=9550P/n (P ແມ່ນກຳລັງມໍເຕີ, n ແມ່ນຄວາມໄວຂອງມໍເຕີ), ເຊິ່ງສາມາດຖອດຖອນໄດ້ຈາກເນື້ອໃນຂໍ້ 1 ຂ້າງເທິງ, ແຕ່ພວກເຮົາບໍ່ຈຳເປັນຕ້ອງຮຽນຮູ້. ເພື່ອ deduce, ຈື່ການຄິດໄລ່ນີ້ A ສູດຈະເຮັດແນວໃດ.ແຕ່ເຕືອນອີກເທື່ອຫນຶ່ງ, ພະລັງງານ P ໃນສູດບໍ່ແມ່ນພະລັງງານ input, ແຕ່ພະລັງງານຜົນຜະລິດ.ເນື່ອງຈາກການສູນເສຍມໍເຕີ, ພະລັງງານຂາເຂົ້າບໍ່ເທົ່າກັບພະລັງງານຜົນຜະລິດ.ແຕ່ປຶ້ມມັກຈະຖືກປັບໃຫ້ເໝາະສົມ, ແລະພະລັງງານປ້ອນເຂົ້າແມ່ນເທົ່າກັບພະລັງງານຜົນຜະລິດ. 
4. ພະລັງງານມໍເຕີ (ພະລັງງານ input): 1) ສູດການຄິດໄລ່ພະລັງງານຂອງມໍເຕີໄລຍະດຽວ: P = U * I * cosφ, ຖ້າປັດໄຈພະລັງງານແມ່ນ 0.8, ແຮງດັນແມ່ນ 220V, ແລະປະຈຸບັນແມ່ນ 2A, ຫຼັງຈາກນັ້ນພະລັງງານ P = 0.22 × 2 × 0.8 = 0.352KW. 2) ສູດການຄິດໄລ່ພະລັງງານມໍເຕີສາມເຟດ: P = 1.732 * U * I * cosφ (cosφ ແມ່ນປັດໃຈພະລັງງານ, U ແມ່ນແຮງດັນຂອງສາຍໂຫຼດ, ແລະຂ້ອຍແມ່ນສາຍໂຫຼດໃນປະຈຸບັນ).ຢ່າງໃດກໍ່ຕາມ, U ແລະ I ຂອງປະເພດນີ້ແມ່ນກ່ຽວຂ້ອງກັບການເຊື່ອມຕໍ່ຂອງມໍເຕີ.ໃນການເຊື່ອມຕໍ່ດາວ, ນັບຕັ້ງແຕ່ປາຍທົ່ວໄປຂອງສາມລວດທີ່ແຍກອອກໂດຍແຮງດັນ 120 °ຖືກເຊື່ອມຕໍ່ກັນເພື່ອສ້າງເປັນຈຸດ 0, ແຮງດັນທີ່ບັນຈຸຢູ່ໃນທໍ່ໂຫຼດແມ່ນຕົວຈິງແລ້ວໄລຍະຕໍ່ໄລຍະ.ເມື່ອວິທີການເຊື່ອມຕໍ່ delta ຖືກນໍາໃຊ້, ສາຍໄຟຟ້າແມ່ນເຊື່ອມຕໍ່ກັບແຕ່ລະປາຍຂອງແຕ່ລະ coil, ດັ່ງນັ້ນແຮງດັນຂອງທໍ່ໂຫຼດແມ່ນແຮງດັນຂອງສາຍ.ຖ້າໃຊ້ແຮງດັນໄຟຟ້າ 3 ເຟດ 380V ທົ່ວໄປ, ທໍ່ແມ່ນ 220V ໃນການເຊື່ອມຕໍ່ດາວ, ແລະ delta ແມ່ນ 380V, P = U * I = U^2 / R, ດັ່ງນັ້ນພະລັງງານໃນການເຊື່ອມຕໍ່ delta ແມ່ນການເຊື່ອມຕໍ່ດາວ 3 ເທື່ອ, ນັ້ນແມ່ນເຫດຜົນທີ່ມໍເຕີພະລັງງານສູງໃຊ້ star-delta step-down ເພື່ອເລີ່ມຕົ້ນ. ຫຼັງຈາກ mastering ສູດຂ້າງເທິງນີ້ແລະເຂົ້າໃຈຢ່າງລະອຽດ, ຫຼັກການຂອງມໍເຕີຈະບໍ່ສັບສົນ, ແລະທ່ານຈະບໍ່ຢ້ານທີ່ຈະຮຽນຮູ້ຫຼັກສູດລະດັບສູງຂອງການຂັບລົດມໍເຕີ. 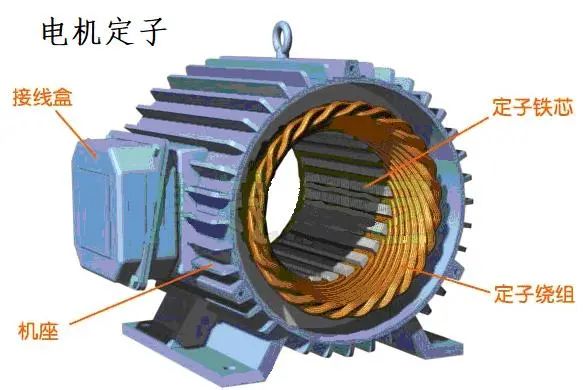
1) ພັດລົມ: ໂດຍທົ່ວໄປແລ້ວຕິດຕັ້ງຢູ່ຫາງຂອງມໍເຕີເພື່ອ dissipate ຄວາມຮ້ອນກັບມໍເຕີ; 2) ປ່ອງ Junction: ໃຊ້ເພື່ອເຊື່ອມຕໍ່ກັບການສະຫນອງພະລັງງານ, ເຊັ່ນ: AC ສາມເຟດມໍເຕີ asynchronous, ມັນຍັງສາມາດເຊື່ອມຕໍ່ກັບດາວຫຼື delta ຕາມຄວາມຕ້ອງການ; 3) Bearing: ເຊື່ອມຕໍ່ພາກສ່ວນ rotating ແລະ stationary ຂອງມໍເຕີ; 4. ການປົກຫຸ້ມຂອງທ້າຍ: ການປົກຫຸ້ມດ້ານຫນ້າແລະຫລັງນອກມໍເຕີມີບົດບາດສະຫນັບສະຫນູນ.
ເວລາປະກາດ: 13-06-2022